「interactive 新型人机协作」人类与机械优势互补,实现共同作业的超柔性生产
随着市场经济的不断发展,消费者的需求越来越趋于多样化,追求有别于他人(高级的、独特的、流行的)商品。新产品层出不穷,企业为了扩大市场占有率,必须适应市场的这种变化。因此,企业产品的多样化(也就是我们常说的多品种小批量的生产模式)就成了一种必然趋势。

为了应对这种新兴的生产模式,欧姆龙提出「interactive 新型人机协作」,通过人与机械互相感知状况,在同一个生产现场通过互补、协助,实现超柔性生产。

2年前,从柔性搬运的自动化开始了人与机械的协作。在这两年间,我们确立了移动操纵机器人(Mobile manipulation)技术,从搬运,部品的抓取、供给、到组装,人与机械的协调作业范围变得越来越广。

如今,在这些技术之上,我们还加入了可追溯、检测非标作业的系统。实现了装置与人相融合,共同生产的,柔性且智能化的单元生产线。在欧姆龙草津工厂,人擅长的作业与机械擅长的作业有明确的分工,把多品种小批量生产的效率提高了200%以上。
在本届中国国际工业博览会(下称“工博会”)欧姆龙展台上,我们也将这套「人机协作的智能化单元生产线」带到了现场,下面就为大家详细拆解其中的各个展示部分以及核心价值。
1、人机协作的智能化单元生产线
「人机协作的智能化单元生产线」是一套融合了AI、IoT、移动操纵机器人(MoMA)、协作机器人等欧姆龙独有的先进技术,基于大数据分析,实际运用在欧姆龙自社工厂的近未来生产管理系统。

部品搬运自动化
First Step:
整合了移动机器人和协作机器人的“移动操纵机器人(MoMA)” 使部品架与作业工序之间的部品搬运完全实现自动化,
-- 移动至部品架 --

-- 抓取料盒 --
Second Step:
“移动操纵机器人(MoMA)” 内置图像识别系统,能够准确拾取料盒,并将其快速地搬送至下一道工序。

-- 视觉识别抓取料盒 --

-- 搬送至后道工序 --
-- 运送物料 --
人机协作
组装和检测工序的作业则由人与协作机器人分担完成, 同时确保安全的社交距离, 提供安心的生产现场环境。

-- 由人工负责第一道拧螺丝工序 --

-- 机器人将物料搬运至第二道工序 --

-- 机器人进行第二道拧螺丝工序 --
-- 完成后搬送至打标工序 --
机器人之间的协作
打标、外观检查、下料与搬送,全部由协作机器人与移动操纵机器人(MoMA)之间配合完成,实现高度自动化生产。
-- 将打标完成的物料取出 --
-- 送至传感器进行外观检测 --
-- 良品确认后完成装盒 --

-- 移动机器人无缝取走料盒 --


-- 再搬运至货架上 --
通过智能化革新IE流程
通过5个色块分别显示5道工序的作业状态,监测作业人员的移动以及每道工序的停留时间,来判断作业是否正确,是否有待机时间等。
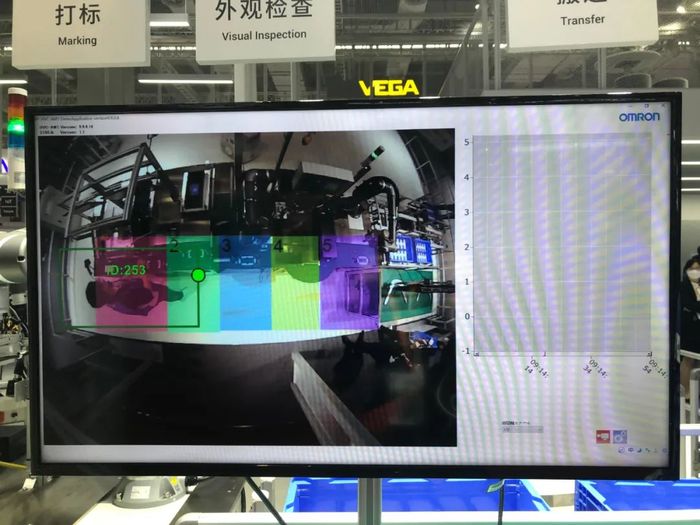
通过每道工序的加工时间、生产数量和累计完成数量、每道工序加工时间的差异可视化管理,谁都能一眼就看出作业偏差等问题,非熟练IE改善师也可以自行进行改善工作。
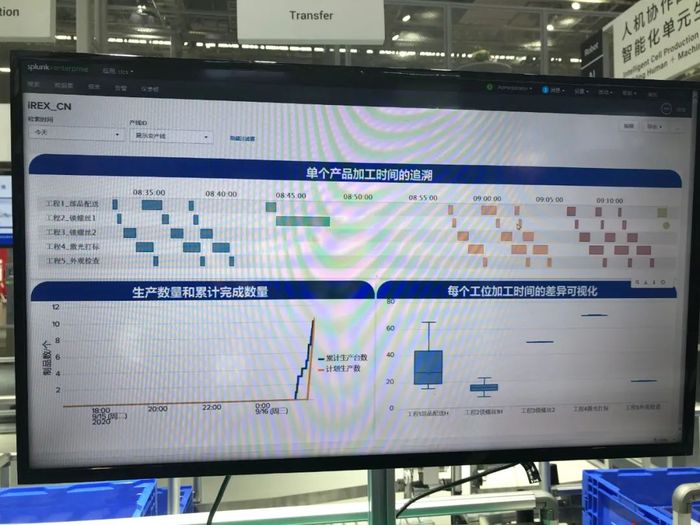
生产线的信息化不仅仅可以使人工作业和动作可视化, 也有助于解决生产现场的人员课题(例如, 培训工人熟练掌握技能等)。
2、设备·Robot·安全·图像的统合控制
当前的制造业,由于新冠疫情的影响,以往生产劳动力资源匮乏的社会问题变得更加严重。与迄今为止一直致力于降低成本的自动化不同,如今需要从保护员工人身安全角度出发,尽可能减少生产对人工的依赖性,所以对机器人导入这样的省人化需求将不断高涨。

但是,在导入机器人的过程中,大家是不是碰到过如下这些课题:
1、自动化生产很难做到像手工作业那么灵活
2、生产性的提高,需要通过设备与设备间的协调最优化。
3、经常在导入机器人后才发现问题,能够最优化工程设计的人才非常稀缺
4、以及如今“后疫情“时代背景下,为防止传染而限制人员流动、保持安全的社交距离这类对新型生产方式的需求
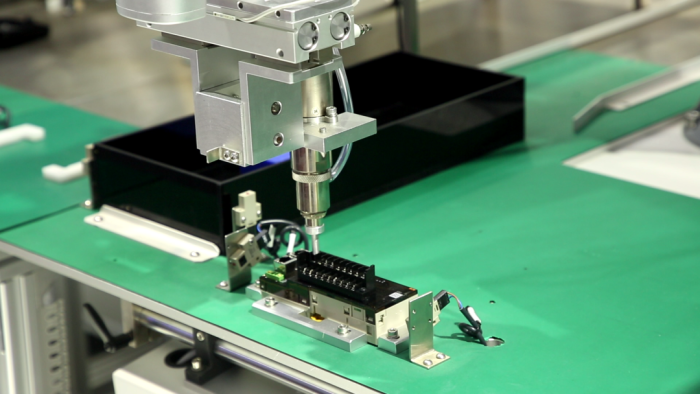
统合控制,完美同步
实现高端手工作业的自动化和提高机械产能的关键在于把,以往零散的input设备,逻辑控制器,output,机器人和安全,统合起来由一个控制器进行控制。我们把这个叫做“控制的统合”。

-- 由SCARA搬送料盘 --
-- 将料盘上的工件Pick&Place --

-- 通过同步控制图像传感器 --

-- 对工件进行分拣 --

-- 将分拣完成的工件装入料盘 --

-- 再将料盘搬送至部品架 --
当中涉及到的机器人(SCARA)、图像(图像传感器)、安全(安全门开关)、设备(传送皮带等)全部通过一个控制器来进行统合控制,这样包括机器人在内的所有设备都可以完美同步和高度自动化,不会出现任何轻微的时间或速度的偏差。
构建过程的统合,实现远程模拟
之所以能实现了Engineering Chain的革新和虚拟生产制作,是因为我们通过一个软件来“构建过程的统合”。

这个价值主要是针对集成商、设备制作商、生产技术工程师等自动化设备构建方的。把生产设备构成中必需要的众多的控制器用一个软件进行统合,简单就可以实现控制器和机器人的完美磨合。
甚至,将CAD数据导入到这个软件中进行模拟,可以在同一个软件中获得包括机器人在内的设备信息。通过对前后工序段的仿真,让导入前的工程设计等的事前验证成为可能,使EngineeringChain的工时削减50%。

通过活用工程模拟,以往不导入上线制作便不了解的情况,现在事前就可以估算出所有设备的效率、消除问题点、无需设计返工,让预测到未来的设备设计成为可能。无需停止设备,也可以离线验证和安排紧急的品种追加和工程追加。
这样的话,像以往我们只有在现场才能确认的设备设计、生产设备稼动的模拟、以及状态监测,都可以在虚拟空间进行再现,让远距离生产制造成为可能。
热点文章
-

珞石机器人举办第四届全球合作伙伴大会
2026-07-20
-

ABB收购罗托克(Rotork),扩展自动化业务布局
2026-07-17
-

倍加福与西门子SIMOVE携手,以传感科技赋能智能物流高效升级
2026-07-17
-

里程碑时刻! 台达 × 秦淮数据首个算力中心 SST 正式投运
2026-07-16
-

ifm新品速递 | JBC系列动态倾角传感器:无惧颠簸,精准如初
2026-07-14
-

延续匠心:研华基于RK3588的核心模块ROM-6881助力便携医用超声实现敏捷迭代
2026-07-17
-

具身机器人量产前夜,研华RK3588 RTXe模块化方案助力“小脑”成本优化
2026-07-17
-

解锁AI落地深水区:红帽开源生态赋能企业数字化跃迁 ——2025红帽论坛重磅发布车用OS
10月31日,以 “解锁・下一步” 为主题的2025红帽论坛暨媒体沟通会在北京JW万豪酒店盛大召开。红帽通过核心主旨演讲、重磅新品发布、权威报告解读及高层对话,全方位展现了其以开源技术破解行业痛点、引领企业数字化转型的实力与愿景,为 AI 时代的企业创新注入强劲动力。
作者:
-
敏捷创新 “中国加速2.0”
-
赋心智 启新程 | 访埃夫特董事长兼总经理游玮博士
-
【MM时光机】2024年度精彩瞬间大盘点 杂志篇
-
施耐德电气亮相CeMAT ASIA 为智能物流多维赋能
-
探索智能未来的下一步 ——第12届中国硬科技产业链创新趋势峰会暨百家媒体论坛成功举办







评论
加载更多