皮尔磁:解读ISO/TS 15066对协作机器人应用的安全要求
近几年来,协作机器人凭借简单易用,安全协作,在工业市场上大受欢迎,人机协作应用的安全性也备受关注。

然而,在很长的一段时间里,机器人的相关标准里对于机器人与人之间如何安全交互并没有明确的表述,导致很多用户对协作机器人安全的定义仍然停留在非常简单的认知,认为协作机器人撞到人能停下来就是安全的。直到2016年,ISO/TS 15066标准的推出,机器人行业才第一次有了自己的“碰撞标准”。它的核心理念是:机器人与人发生碰撞时,保证人体产生的疼痛感低于能够承受的疼痛阈值。
HRC的四种人机协作方式
ISO/TS 15066中的定义了人机协作的四种方式,分别是:
● 安全监控静止
● 手持式引导
● 速度和距离监控
● 功率和力的限制
今天咱们来聊聊协作程度最高的第四种方式Power and force limiting (即功率和力限制),对于具备这一特性的协作机器人来讲,究竟把功率和力的大小限制到何等程度才算是安全呢?
ISO/TS 15066里的“身体模型”
人体各部位所能承受的疼痛阈值是不同的,需要分区域对待,所以首先需要建立一个身体模型。ISO/TS 15066里用到的身体模型比较简单,把人体划分为29个部位:
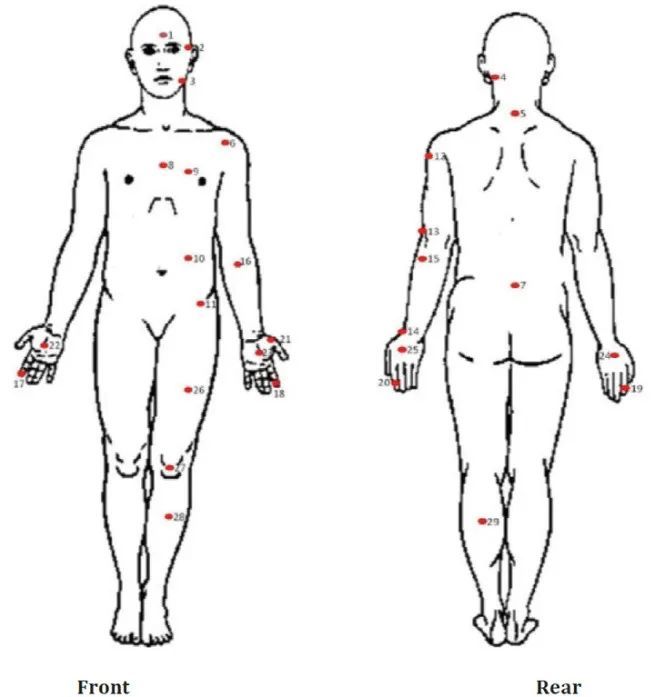
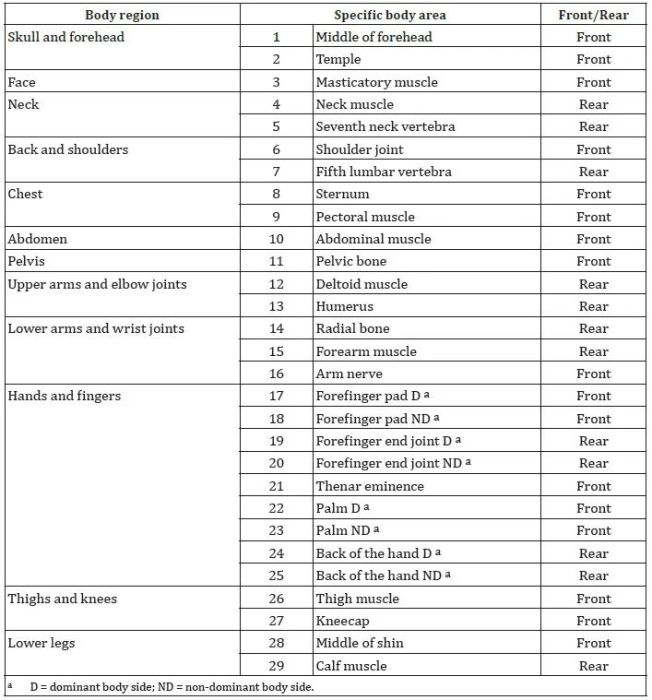
身体模型中29个部位在准静态和瞬态接触两种情况下所对应压强和力的疼痛阈值见下表:
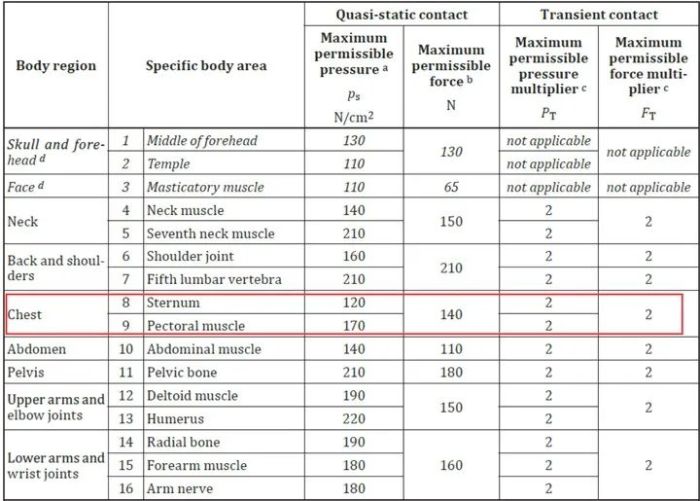
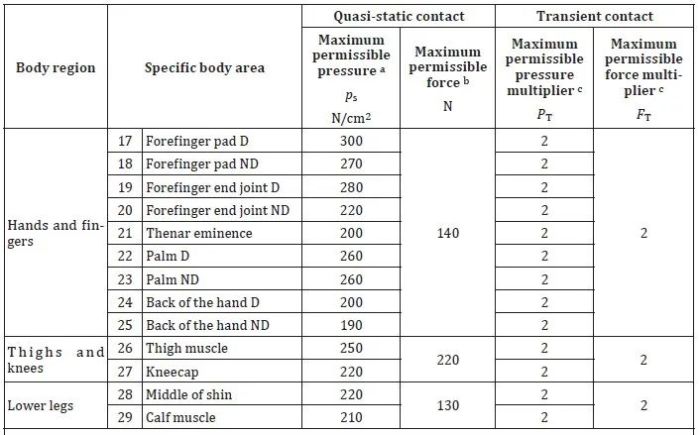
这么多数据看起来有没有一种很头疼的感觉?如果看懂了其中的门道,表格的内容其实很简单,也就是分别列出了人体各部位在准静态接触和瞬态接触两种情况下所能允许的压强和压力。
以胸部区域(Chest)为例(见上表红色圈出的部分),在准静态接触时,胸骨和胸肌所能允许的最大压强分别为120N/cm2和170N/cm2,最大压力为140N;而在瞬态接触时,最多可以达到以上数值的2倍。
准静态接触VS瞬时接触
准静态接触:在操作员及机器人系统之间的接触,操作员的身体部位可在机器人系统移动部件及另一个机器人单元的固定或移动部件之间被夹住。
瞬时接触:在操作员及机器人系统之间的接触,操作员的身体部位不会被夹住,并可从机器人系统移动部分退回或缩回
ISO/TS 15066中对于人与协作机器人发生碰撞时的力与压强做出了详细定义,为验证协作机器人在应用中是否真正安全提供了量化的标准。那么在人机协作的实际应用中,如何正确测量碰撞产生的力和压强呢?
皮尔磁推荐您采用——“人机协作应用的碰撞测试”
说到“碰撞测试”,大家比较熟悉的应该是汽车的碰撞测试。一般消费者在购买新车评估其安全性时,除了参考汽车厂家宣传的参数配置外,第三方独立检测机构的碰撞测试结果,也越来越受到重视。碰撞测试可以模拟出司机及乘客在汽车发生不同碰撞时受到的伤害程度。相比官方的汽车配置数据,第三方的碰撞测试报告结果往往更具说服力,也更容易获得消费者的认可。

“人机协作应用的碰撞测试”是专门针对人机协作的碰撞测试,通过专业的碰撞测试设备,对人机协作应用时的碰撞极限值进行验证,并记录会导致发生潜在碰撞的力和压强。
对于人机协作的应用,安全性是必须关注的重点。除了这期的“力和压强篇”,皮尔磁后续还计划推出一篇介绍影响协作机器人应用安全的几大因素的内容,希望这两期关于ISO/TS 15066的内容,帮助大家快速理解和掌握标准的要点,让协作机器人成为“真正安全”的协作伙伴。
热点文章
-

珞石机器人举办第四届全球合作伙伴大会
2026-07-20
-

ABB收购罗托克(Rotork),扩展自动化业务布局
2026-07-17
-

倍加福与西门子SIMOVE携手,以传感科技赋能智能物流高效升级
2026-07-17
-

里程碑时刻! 台达 × 秦淮数据首个算力中心 SST 正式投运
2026-07-16
-

ifm新品速递 | JBC系列动态倾角传感器:无惧颠簸,精准如初
2026-07-14
-

延续匠心:研华基于RK3588的核心模块ROM-6881助力便携医用超声实现敏捷迭代
2026-07-17
-

具身机器人量产前夜,研华RK3588 RTXe模块化方案助力“小脑”成本优化
2026-07-17
-

解锁AI落地深水区:红帽开源生态赋能企业数字化跃迁 ——2025红帽论坛重磅发布车用OS
10月31日,以 “解锁・下一步” 为主题的2025红帽论坛暨媒体沟通会在北京JW万豪酒店盛大召开。红帽通过核心主旨演讲、重磅新品发布、权威报告解读及高层对话,全方位展现了其以开源技术破解行业痛点、引领企业数字化转型的实力与愿景,为 AI 时代的企业创新注入强劲动力。
作者:
-
敏捷创新 “中国加速2.0”
-
赋心智 启新程 | 访埃夫特董事长兼总经理游玮博士
-
【MM时光机】2024年度精彩瞬间大盘点 杂志篇
-
施耐德电气亮相CeMAT ASIA 为智能物流多维赋能
-
探索智能未来的下一步 ——第12届中国硬科技产业链创新趋势峰会暨百家媒体论坛成功举办







评论
加载更多