皮尔磁:协作机器人系统的危险识别
新冠疫情导致的种种困顿,使得人们对机器人尤其是协作机器人的关注度空前高涨,“机器人换人”的概念再度掀起热潮,协作机器人的出货量也屡创新高。

“走出笼子的工业机器人”
众多知名的市场调研机构认为,协作机器人为整个机器人行业注入了新鲜的血液,将引领整个机器人行业的下一个十年。根据日本Yano Research Institute市场报告的预测,2021年协作机器人的全球出货量预计可达2.87万台,而到2030年,该数字预计将突破10万台大关。
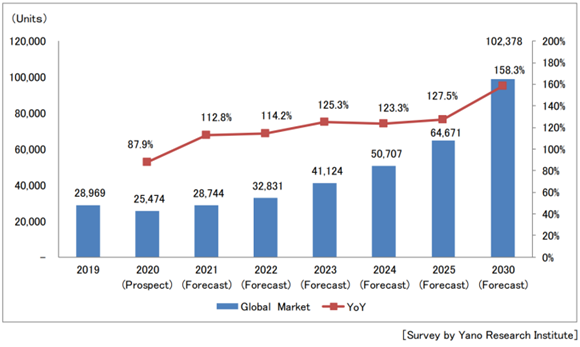
全球协作机器人出货量趋势
协作机器人在中国市场的前景也非常可观,即使是在2020年全球协作机器人销量回落的大背景下,国内市场也保持增长,出货量约占全球市场的32.2%,成为协作机器人在全球范围内增长最快的市场。
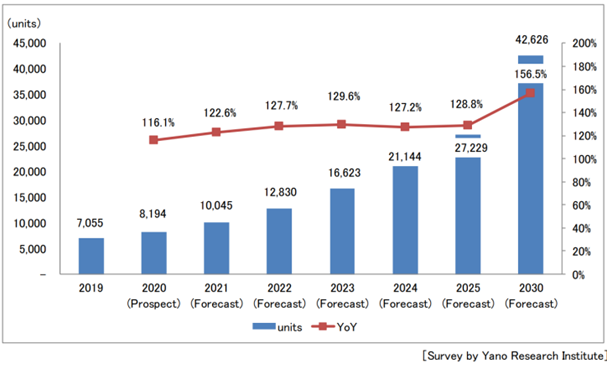
中国协作机器人出货量趋势
协作机器人更需要安全评估和安全防护
有些用户认为协作机器人是“安全的”,使用了协作机器人之后就不再需要进行安全评估和采取相应的防护措施,这其实是一种不正确的认知。协作机器人归根结底仍属于机器范畴,应用不同存在的风险也不同,在把协作机器人彻底放出“笼子”之前,一定要确保其应用已经足够安全,否则将可能导致严重的后果。
这次我们将从协作机器人系统设计的角度,来聊聊在设计之前需要考虑的风险。
协作机器人危险的“三宗罪”
在GB 11291.2-2013 《工业机器人的安全要求 第2部分:机器人系统与集成》(即EN 10218-2)及GB/T 36008-2018 《机器人与机器人装备 协作机器人》(即ISO/TS 15066)中规定,对于协作机器人系统,应考虑整个协作任务和工作空间进行风险评估。

协作机器人的危险应至少包含三大方面:
1. 机器人本身的相关危险:
a. 机器人的特性(如负载、速度、力、功率、表面形状等)
b. 机器人准静态接触的条件
c. 操作员站位接近机器人手臂的情况(如防止在机器人下方工作)
2. 机器人系统的相关危险:
a. 末端执行器与工件的危险,包括缺少人体工程学设计、锋利边缘、工件缺失、凸出物等
b. 操作员的站位与路径相对于零件位置、结构朝向以及夹具上危险位置的关系
c. 夹具设计、夹板布局和操作以及其他相关危险
d. 判定接触时是瞬态还是准静态,以及操作员哪些身体部位可能会受影响
e. 任何手动控制机器人导向装置的设计与布置(如可及性、人体工程学、潜在误用等)
f. 周边设备或环境的影响(如邻近机器的保护罩被移开、激光切削物的靠近等)
3. 应用的相关危险:
a. 过程中的特定危险(如温度、零件迸出等)
b. 使用个人防护装置所导致的限制
c. 人体工程学设计的不足(如导致注意力缺失、操作不合理等)
在危险识别时,所有在合理范围内可预见的任务与危险都应一同进行识别,再采取相应的风险减少的措施。对于传统工业机器人系统来说,风险减小通常通过防护装置分隔操作员和机器人系统来实现。而协同操作则不同,风险减小主要通过机器人系统和协作空间的设计与应用来实现。
没有绝对安全的机器人,只有安全的机器人应用
协作机器人优点众多,但如果在设计前没有将协作机器人系统的危险完整识别出来,则相当于将操作员赤裸裸地暴露在危险之下,一旦发生事故,后果不堪设想,风险评估是协作机器人系统设计的基础。
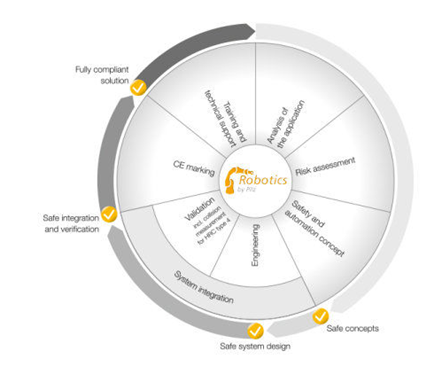
皮尔磁在协作机器人的安全应用方面积累了丰富的经验,可以提供针对协作机器人的风险评估,系统设计与系统集成,安全验证和培训的“交钥匙”工程服务。
热点文章
-

珞石机器人举办第四届全球合作伙伴大会
2026-07-20
-

ABB收购罗托克(Rotork),扩展自动化业务布局
2026-07-17
-

倍加福与西门子SIMOVE携手,以传感科技赋能智能物流高效升级
2026-07-17
-

里程碑时刻! 台达 × 秦淮数据首个算力中心 SST 正式投运
2026-07-16
-

ifm新品速递 | JBC系列动态倾角传感器:无惧颠簸,精准如初
2026-07-14
-

延续匠心:研华基于RK3588的核心模块ROM-6881助力便携医用超声实现敏捷迭代
2026-07-17
-

具身机器人量产前夜,研华RK3588 RTXe模块化方案助力“小脑”成本优化
2026-07-17
-

解锁AI落地深水区:红帽开源生态赋能企业数字化跃迁 ——2025红帽论坛重磅发布车用OS
10月31日,以 “解锁・下一步” 为主题的2025红帽论坛暨媒体沟通会在北京JW万豪酒店盛大召开。红帽通过核心主旨演讲、重磅新品发布、权威报告解读及高层对话,全方位展现了其以开源技术破解行业痛点、引领企业数字化转型的实力与愿景,为 AI 时代的企业创新注入强劲动力。
作者:
-
敏捷创新 “中国加速2.0”
-
赋心智 启新程 | 访埃夫特董事长兼总经理游玮博士
-
【MM时光机】2024年度精彩瞬间大盘点 杂志篇
-
施耐德电气亮相CeMAT ASIA 为智能物流多维赋能
-
探索智能未来的下一步 ——第12届中国硬科技产业链创新趋势峰会暨百家媒体论坛成功举办







评论
加载更多