为什么要进行建模仿真?
今天,数字孪生、人工智能、工业互联网、边缘计算这些概念在整个产业里非常的火热,但是,要知道,如果这些概念没有“模型”作为基础的话,那么这些概念将无法真正落地,因为模型是数字世界与物理世界连接的桥梁,另一方面,仿真技术使得在复杂变化的制造现场可以实现非常多的虚拟测试、早期验证,降低整个制造业的整体成本,很多时候,我们必须了解为什么要进行建模仿真?
机器生产中的复杂变化
究竟机器的生产有多么复杂?只有研发机器的工程师们才能更清楚,在每个行业,生产的复杂度都包含了多个维度:
(1)材料的复杂性:在印刷中,纸张或薄膜都是数千种可能性,而在纺织机械领域天然的纤维如棉花、丝、羊绒等都是随着产地而纤维特性不同,在塑料领域的颗粒种类也千变万化,他们都拥有不同的流体加热变形属性,在灌装领域,瓶子的材料、规格也是千变万化。
(2)工艺的复杂性:对于印刷本身也有柔版、凹版、胶印多种,包括轮转与单张的组合,还有涂布、裁切等的组合,对于纺纱也包含了转杯纺、涡流纺、气流纺、环锭纺等多种形式。
(3)流程的复杂性:生产的工序也随着生产任务的不同而变化,比如灌装不同类型的饮料时候所需的电子阀动作流程也不同,碳酸饮料与非碳酸饮料,或者贴标单元可能会有1个、2个、3个不同的标签,都会组合成不同的工序流程。
图1-机器的变化组合成千上万
如图1所示,从上面三点,我们就可以看到,一台机器如果希望它具有广泛的适应力,那么,它在材料、工艺、流程三个方面就会组合出成千上万种组合,这是制造的复杂的地方—也是为什么必须进行建模仿真的原因。
如果不采用建模仿真来进行这样的模型构建,对于机器的开发而言,就必须进行大量的物理测试与验证,这个成本是极其巨大的—尽管,我们采用了测绘的方式,减少测试验证环节的投入,一个机器的研发仍然是投入巨大的,尤其是具有“高端”定位的机器,它必须拥有稳定而可靠的,适应变化生产的能力。
建模仿真带来哪些应用优势?
如果我们全流程的看待机器的开发,从概念设计、原型设计、测试验证,整个流程中,最烧钱的地方在哪里?
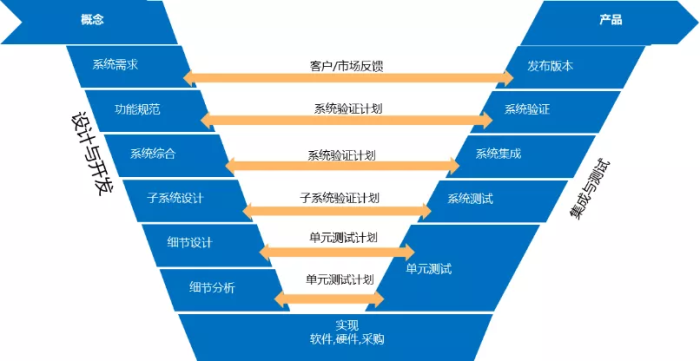
图2-基于V模式的开发
对于机器与系统的开发,V-Mode是普遍被应用的模式,在整个设计与开发阶段,从概念到需求、功能规范、子系统设计再到实现,各个阶段对应都有相应的测试与验证,这个集成测试验证是确保每个流程都能够保证任务的质量与进度得到控制,顺利完成产品整个的研发过程,而这些过程中,真正需要耗费大量的成本的往往是测试验证这些过程。
在传统的机器设计中,这个环节往往需要按照严格的流程来进行,而通过建模仿真所实现的虚拟测试与验证可以使得这个环节被提前,缩短整个流程周期,如图3所示即是并行工程,有了建模仿真这样的开发工具和方法,可以实现电气控制与应用软件和机械的并行开发。
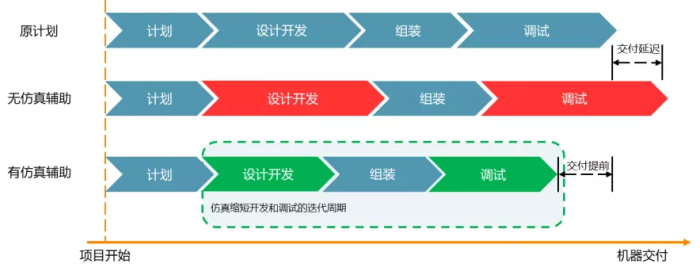
图3-并行工程
建模仿真可以让机器的开发带来非常多的便利,包括如图4的几个方面:
(1)虚拟调试缩短开发周期与降低成本
对材料的工艺特性、机械传动、控制的联合测试中,只有在虚拟环境中,对参数进行最优的调整,才是最节省成本的,只有几乎完成最优后,再下载到物理对象上进行验证,才能更好的实现成本的降低,否则,例如印刷机,如果要进行某种材料的测试,300米的速度下一卷纸就10分钟多烧完了,几千块的材料费用就很快消耗掉,而大量的机器功能会造成巨额的测试成本。
(2)降低安全风险
对于一些设备而言,虚拟测试与验证还可以降低安全风险,例如风力发电对于各种安全机制的测试,包括在一些大型机械装备的开发中,如果没有良好的安全机制保障,那么就有潜在的安全风险,因此,可以在虚拟环境中进行。
(3)复用的组件开发
对于很多具有共性的应用软件来说,例如张力控制模型针对塑料薄膜、印刷的纸张、纺织的纱线、金属板材的开卷校平、弹簧送丝等各种场景来说,可以用于开发各种控制模式下(闭环、开环、有跳舞辊、伺服电机调节等)的模型及其参数验证,然后封装为可复用的共性组件,在应用开发中,直接配置其模式、参数等,加速机器的配置,响应快速的市场变化需求。

图4-建模仿带来的好处
因此,建模仿真是一种显著降低成本的方案,而且有了这些模型后,针对未来的数据应用可以实现:
(1)数字孪生:通过动态的实时交互,数字系统与物理系统可以进行动态验证,尤其在个性化生产中,这种实时交互对于响应产线变化至关重要。
(2)AR/VR应用:有了模型后,这些模型与现场数据的匹配会让AR/VR的应用成为可能,可以进行可视化培训、在线安装调试的指导等等工作。
(3)机器学习:数据驱动与模型驱动必须融合,才能各自发挥其优势,基于数据的可以发掘潜在的规律,而模型将已有的知识形成控制,两者互补,学习到的新规律可以被融入到机理模型,而机理模型又能够为学习奠定基础。
总之,有了模型,可以做非常多的事情,可以让机器制造商实现非常多的机器灵活设计和功能设计。
建模仿真是真正创新设计的源头
“知其然,也要知其所以然”—这就是在制造领域里我们必须知道机器设计的“Why”-源头的原理,建模就是对整个机器进行真正的根源性设计,而这种设计也是后续所有“创新”的源泉,如果缺乏这些数字建模,那么就意味着我们缺乏“变化”的能力,只是测绘了一种机械,而没有掌握它的原理性设计,即使采用“逆向工程”,其实,也是不能完全掌握其设计精髓,无法让我们在这个基础上获得创新,当在竞争中,做一些调整,尤其是现在机械的Know-How更多的是工艺软件形式存在、安装方式的话,对我们来说就会意味着不知道的“坑”—要想真正实现差异化、超越,必须回到原始的建模上,才能真正掌握“核心技术”。
贝加莱支持建模仿真的实现方法
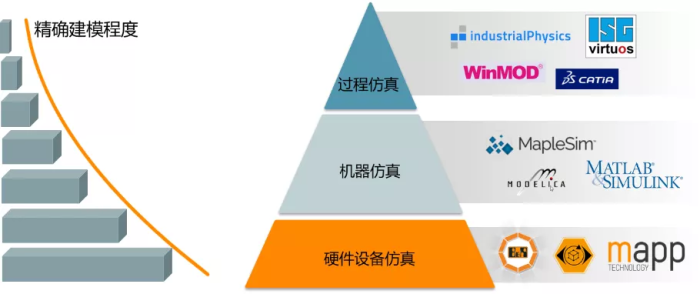
图5-贝加莱的建模仿真层级
作为领先的自动化厂商,在建模仿真领域,在早期的控制系统设计时即采用了建模仿真的接口连接,自2008年Mathworks推出Simulink PLC时,最初发布针对C代码的自动代码生成,贝加莱的Automation Studio即支持高级语言,通过AS Target for Simulink接口可以一键导入到Automation Studio中进行硬件在环测试(Hardware In the Loop),在之后又与MapSim、IndustrailPhysics进行了合作,开发基于FMU/FMI接口,FMU是功能模型单元,而FMI是功能模型接口,通过在MapSim和IndustrialPhysics中的建模仿真的代码(二进制)和描述(XML)可以被通过FMI下载到Automation Studio中进行测试。
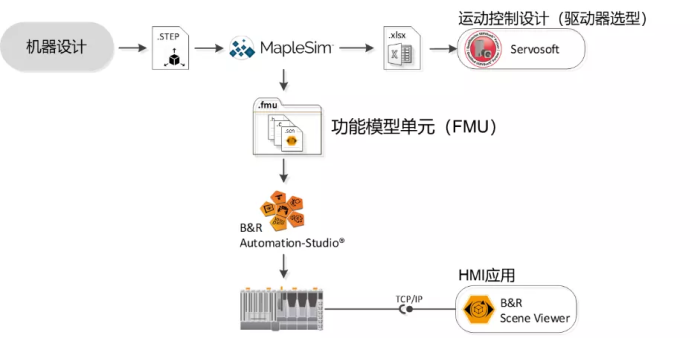
图6-Automation Studio与各种建模仿真软件的交互过程
贝加莱自身Automation Studio中有针对硬件设备的仿真和ScenViewer的可视化呈现,而MATLAB/Simulink是针对传感器、控制与驱动系统的建模仿真,MapleSim则是针对机械的传动控制、运动学、物理学(摩擦力、张力)等进行建模仿真,如图6所示,IndustrialPhysics则是针对生产流程,产线联合进行包括避免碰撞、物料流动过程的建模仿真,即,面向生产过程的建模仿真,这些都可以通过FMU/FMI与Automation Studio进行交互,未来,这个接口也可以是基于OPC UA来实现。
建模仿真的实现案例
在集装箱吊装的岸桥系统、履带吊、龙门吊等领域因为钟摆效应使得被吊装的物体不能快速处于稳定状态,而使得整个效率比较低,防摇系统即用于解决这类问题,在贝加莱,工程师们通过如图7所示的过程,首先对岸桥的吊装过程进行物理的建模(吊装的路径尺寸、岸桥机械、摩擦力、位置、速度等传感器采样)、然后在MATLAB/Simulink里对它的控制对象-变频器的输出进行算法设计和参数调校,使得获得一个最佳的控制模型,然后下载到Automation Studio进行物理对象的虚拟调试,进行各种场景下的功能测试(下方有/无障碍物、加速度限制、手/自动切换),然后经过反复验证后代码封装成一个软件功能块,供反复的使用,用户根据自身的岸桥机械、功能需求进行配置这个模块,即可生成整个应用程序,快速而可靠。
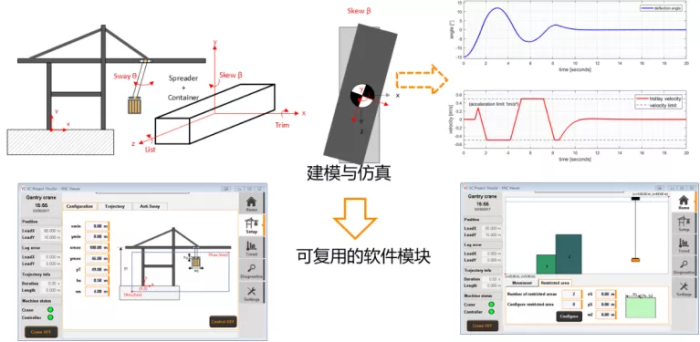
图7-防摇系统的建模仿真开发

图8-防摇系统的功能设计
图8是基于建模仿真开发的防摇系统的功能和特性,包括防止碰撞的安全区设计、轨迹信息预知、手/自动切换、轨迹上停车、轨迹限制、精确定位等功能,该系统已经在多个港口的岸桥系统得以应用。
在无数的变化中,如果没有建模和仿真,我们将迷失在材料和流程的千变万化中不得其法,而所有的创新都来自于我们对客观世界的理解,对我们知识的凝聚,而建模仿真则是实现这个创新与发展的根基。





























获取更多评论