台达全自动湿纸巾粘盖机一体化控制解决方案 提升湿巾盖贴装生产效率
项目背景
随着疫情在全世界的全面发酵,越来越多人更加注重对个人卫生的防护,除了口罩、酒精等直接防护用品外,湿纸巾作为一种可以随身携带的个人清洁用品,在快速清洁皮肤、简单消毒方面十分的方便,也受到了越来越多人的欢迎,因此其生产也越来越重现高度自动化。全自动湿纸巾粘盖机,正是湿纸巾生产包装中的一种常见设备,作用是在湿巾包装袋的开口处粘贴一个贴了标签的塑料密封盖子,以方便包装袋打开以后可以继续保持内部的密封性。台达针对全自动湿纸巾粘盖机的加工特点,为其提供了一体化控制解决方案,拥有粘盖精度高、速度快、适应性强、故障率低等特点,显著提升设备湿巾盖贴装的生产效率。
设备工艺
全自动湿纸巾粘盖机采用高性能自动柔性粘盖技术,主要由两条输送线和一台DELTA 机器人组成,辅助有一台视觉定位系统、一台贴标机和一台热熔胶机。设备工艺是湿巾输送带把湿巾包有序的输送,当到达视觉定位采集区时,视觉系统把湿巾包的坐标采集储存传送给DELTA机器人系统,与此同时送盖输送带把盖子送到DELTA机器人的取盖位。DELTA机器人接收到视觉系统的数据后,经过计算得出粘盖的区域,机器人从送盖输送带的取盖区把盖子取走,在涂胶区涂好热熔胶,等待湿巾包输送到粘盖区,机器人跟随输送带把盖子粘到湿巾包上(CVT跟随算法),湿巾粘盖完成,成品送出。

图1 全自动湿巾贴盖机工艺流程图
设备结构
全自动湿巾贴盖机,是集视觉识别、伺服贴标、机器人涂胶粘盖、变频输送为一体的控制设备。其电气控制采用台达自动化整套解决方案,以台达CANopen多轴运动控制器DVP-15MC以及可作为DELTA机器人主控制器的台达控制驱动一体机ASDA-MS系列为主控单元,通过Ethernet、CANopen、RS485三种总线和驱动元件连接,方便快捷的监控整套系统和数据采存。
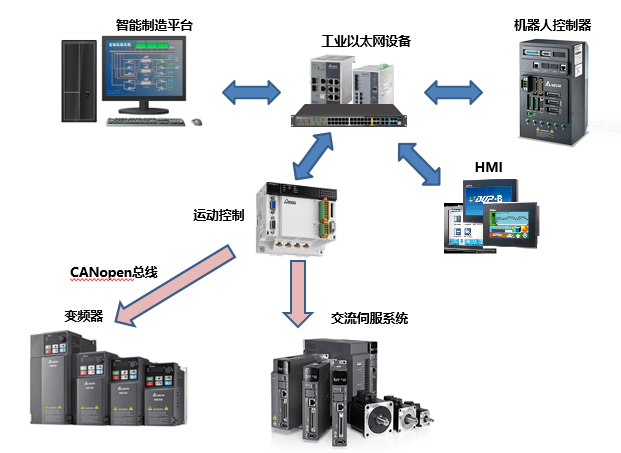
图2全自动湿巾贴盖机控制系统框图
涂胶控制原理
全自动湿巾贴盖机,基本胶型有蛋型、椭圆型、跑道型、矩型等控制原理。以矩型涂胶为例,是胶型的起始及结束点产生一个矩形区域,检测当前机器人世界坐标位置,当机器人末端移动到矩形区域内后,触发控制驱动一体机ASDA-MS系列控制IO,从而达到机器人运动过程的胶枪控制。
贴标工艺
全自动湿巾贴盖机盖子贴标控制以台达PLC-based多轴运动控制器 DVP-15MC产品为控制器,通过CANopen总线控制台达伺服驱动系统ASDA-A2,通过控制器内部的探针功能和纠偏算法,使设备的调标工艺的速度和精度都达到预设的水准。其中,贴标精度可到±1mm,贴标速度为180个/min。
粘盖工艺
全自动湿巾贴盖机粘盖工艺包括取盖、涂胶、粘盖等动作流程:
1)设备启动:DELTA机器人移动到上方安全位置(2),前往取盖上方点(1)等待(DVP-15MC控制器的送盖信号);
2)正常运行:获取送盖信号后,前往取盖点(1)等待取盖,湿巾包过触发线,获取当前需要粘盖湿巾的包数,根据条件返回结果。
3)当前在取盖点,根据上述判断控制触发取条件,控制驱动一体机ASDA-MS系列发出指令。
4)前往取盖上方点(2),取盖完成记录数量, 前往涂胶开始起点(3、4),触发开胶时机功能,开启范围胶枪控制。
5)到达涂胶起始点涂胶开始范围,根据取盖数量判断开启胶枪数量。
6)运动到涂胶轨迹路径关胶范围,关闭喷胶。
7)自动前往粘盖上方点5(粘盖上方1点),然后前往粘盖点6(粘盖1点)粘1盖,后回到粘盖上方点5。若只取了两个盖,则再前往粘盖上方点7(粘盖上方2点), 然后前往粘盖点8(粘盖2点)粘2盖,后回到粘盖上方点7。
8)回到取盖上方点,等待进入粘盖下一次循环。
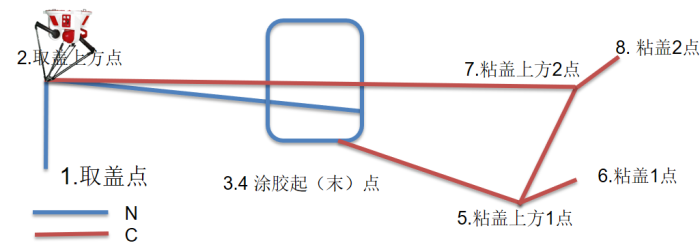
图3全自动湿巾贴盖机粘盖工艺流程图
总结
经过测试,该方案可以显著提高全自动湿巾贴盖机的生产精度和速度,达到每分钟50-80个产品的生产速度,显著提升了客户的竞争力。





























获取更多评论