丹佛斯变频器FC302驱动器驱动HIPERFACE编码器
摘要:丹佛斯FC300驱动器是高性能的伺服驱动器,加装各种编码器选件卡以后可以驱动各种伺服永磁同步电机。本文就丹佛斯FC302驱动器驱动带HIPERFACE编码器反馈的伺服永磁同步电机的应用加以详细论述。
关键词:伺服永磁同步电机 HIPERFACE
引言:随着生产速度和精度的提高,越来越多的设备需要使用伺服驱动。丹佛斯公司针对驱动应用开发了高性能的FC302系列伺服驱动器,适用于各种伺服永磁同步电机。伺服永磁同步电机有各种位置反馈装置,常见的有旋转变压器,EnDat绝对位置编码器,SSI绝对位置编码器等。Hiperface编码器也是一种常见的高精度编码器,但是国内目前使用较少,因此需要对其具体应用方法作详细介绍。
一、 HIPERFACE编码器工作原理
HIPERFACE编码器是一种串行绝对位置和正余弦模拟量信号混合编码器,内部原理框图见图1
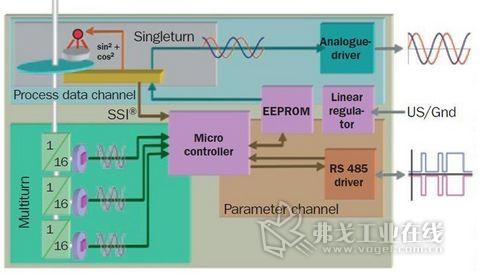
图1,HIPERFACE编码器内部逻辑框图
编码器有每转2n周期的正、余弦模拟量信号输出,又有RS485通讯绝对位置数字量信号输出。正、余弦模拟量信号送入编码器选件卡以后,又被分为两路。一路经比较器整形以后变成A、B相增量脉冲信号,送入计数器,如同普通的增量编码器;另一路放大后送入A/D转换器,作绝对位置解码用,如同普通的旋转变压器。RS485串行通信接口默认通信速率为9600Bd。
HIPERFACE编码器同时解决了转速、永磁同步电机换向位置检测和高精度角度位置的检测的问题。上电初始,驱动器先通过RS485串行接口读出当前的绝对角度位置;然后根据增量脉冲信号获取当前位置;高精度的正、余弦模拟量信号能提供极高精度的位置信息;而与此同时,信号频率即使在很高的转速下依然保持在相对较低的水平,因而能传输较远的距离。
二、接线:
丹佛斯编码器选件卡MCB102支持长线驱动增量形编码器、EnDat绝对位置编码器、SSI绝对位置编码器和HIPERFACE接口编码器。当接HIPERFACE接口编码器时,接线图如图2所示。
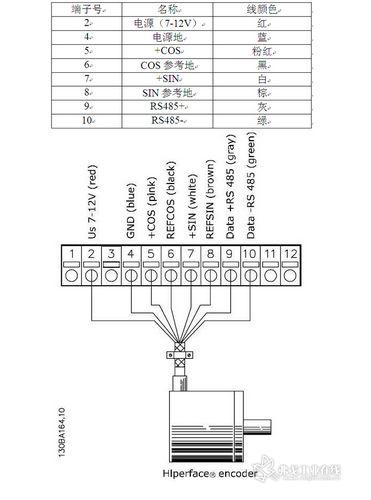
图2,HIPERFACE编码器接线图
三、 驱动器参数设置:
以下以FC302驱动施耐德伺服永磁同步电机BSH1002M11F2A(SKS360 HIPERFACE编码器反馈)为例,说明驱动器的参数设置办法。FC302驱动器加装了MCB102编码器反馈选件卡和MCO305运动控制选件卡。
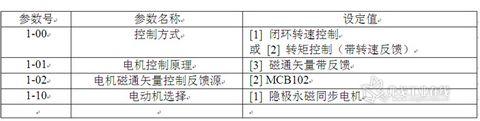
1. 控制方式和电机选择:
2. 永磁同步电机的电机参数:
永磁同步电机参数除了电机额定电流、额定转速、额定转矩、电机极数、定子电阻之外,还有自己的特有参数:1000rpm时感应电势和d轴电感。
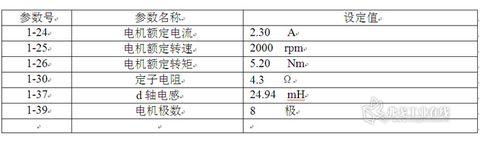
查阅电机说明书,得到电机参数表1:
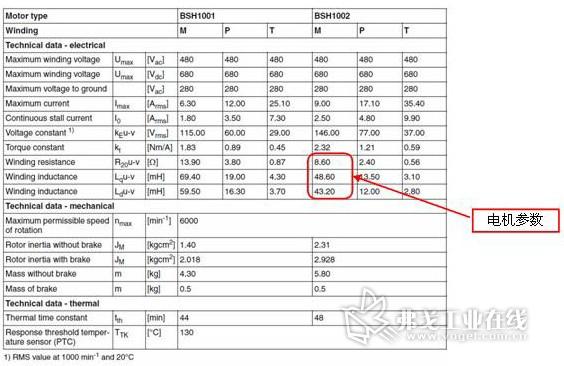
380V驱动器内部直流电压约530V,考虑20%欲量,应选择400Vdc选此组电机额定参数,因此得到电机额定电流2.30A、额定转速2000rpm、额定转矩5.20Nm和电机极数8极。
电机参数表2:
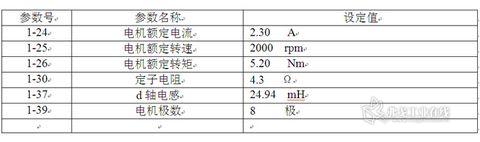
查电机参数表2得到电机1000rpm时感应电势146V;R20U-V为8.6Ω,换算为丹佛斯的“定子电阻”,需要除2;LdU-V为43.20mH,换算为丹佛斯的d轴电感需要除 。
变频器内电机参数设置如下:
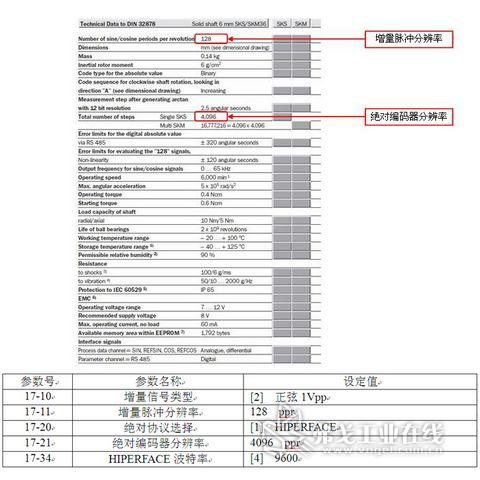
3. 编码器参数:
查阅编码器说明书,得到编码器参数表:
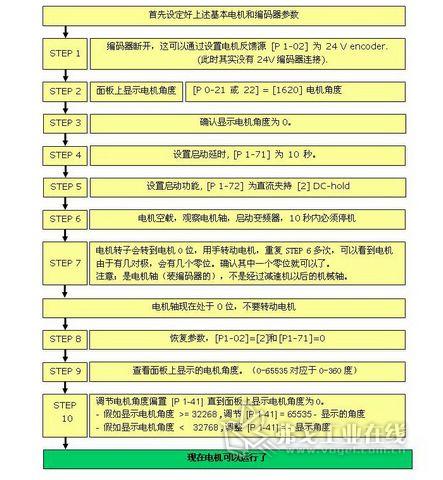
四、 转子磁极位置偏差校准办法:
永磁同步电机的矢量控制需要知道电机转子的确切角度位置,由于厂家安装的原因,绝对编码器反馈的位置与电机转子的零位存在相位差,所以需要通过调试测得此相位差。丹佛斯FC302驱动器测试此相位差的具体调试步骤如下:
五、 位置控制方法:
丹佛斯运动控制卡MCO305具有多种运动控制功能,可以实现绝对或相对位置定位,角度或速度同步控制,电子凸轮控制等功能。MCO305本体有两个编码器输入接口,支持增量或SSI多圈绝对位置编码器。其中一个接主机编码器信号,另一个接本机编码器信号。当本机编码器信号来自选件卡MCB102时,需要设置以下参数:

六、 运行效果:
电机空载运行时电流只有约0.06A,定位响应很快,完全满足用户的要求。
参考文献[1] FC300 Design Guide. MG33BC02. Danfoss
[2] MCO305 Design Guide. MG33L502. Danfoss
[3] BSH Servo Motor manual. V2.00. 2010.06. Schneider Electric
[4] SKS36 SKM36 Data Sheet. 2010.10. SICK STEGMANN
























获取更多评论