抓取系统的通信技术选择
在实现抓取系统机电一体化的过程中,通信接口的选择变得愈发重要。没有一个标准的解决方案。在预算有限,又希望充分发挥组件、控件和更高级别系统之间的通信潜力时,投资前进行分析具体需求是明智之举。
在机电一体化战略框架中,雄克区分了三类通信:数字I/O、IO-Link、工业以太网及总线接口。尤其是带有IO-Link和工业以太网接口(PROFINET、EtherCAT和EtherNet/IP)与PROFIBUS和CAN总线接口的抓取部件发展势头迅猛。这与行业总体发展相一致:全球已安装了2100多万个PROFINET节点,其中800多万个使用IO-Link,这一趋势正在上升。西门子、倍福、博世和罗克韦尔自动化等控制和电子制造商以及KUKA、FANUC或三菱等机器人制造商被视为现代标准的主要驱动力。雄克等零部件供应商的目标是通过提供全面的产品覆盖整个市场,且必须考虑从通信到控制的整体应用。最终,期望组件能够完美地与每个可编程控制器、每个机器人控制系统一起工作。

图1 SCHUNK EGP(安装于SCHUNK ELP 24V线性轴上)可以通过数字输入/控制,可以直接用于机电一体化抓取项目
分层机电一体化计划
除了不断扩展成熟的气动元件之外,雄克在早期也开发了机电一体化程序。基于三个层级:首先,以24V小部件机械手SCHUNK EGP为代表,通过数字I/O控制,能够以1:1替换现有的气动部件。第二,类似于SCHUNK EGA长行程机械手的组件,可以通过适配器组合通用伺服电机,适应现有的控制环境。最后,如最高级别C类认证的PROFINET SCHUNK EGL通用机械手,具有完全集成的电机、控制技术,并通过工业以太网接口进行控制。除此之外,系列还在逐步扩大,例如可使用IO-Link界面的组件。由于IO-Link节点的价格下降、IO-Link 的开放性和简单性、安装过程的简化以及对参数化和诊断选项需求的增加。雄克也向市场提供带有IO-Link接口的机电一体化24V通用机械手SCHUNK PGN-plus-E和24V小部件机械手SCHUNK EGP。对于系统构建者、集成商和用户来说,了解各个接口的优势和技术限制可以帮助他们真正权衡各种选择的利弊。
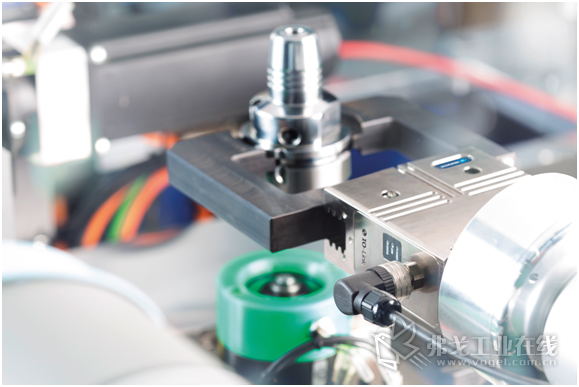
图2 配备IO-Link的PGN-plus-E实现灵活工艺和方便简单的调试
简单应用的数字 I/O技术
带数字I/O的机械手是机电一体化搬运领域的入门级选择。当第一次从气动切换到机电抓取系统时,通过数字I/O进行控制会更简单,因为控制原理相同,且不需要编程知识。正是因为该原因,小型机械手SCHUNK EGP很早就取得了市场成功。它具有高速和高抓取力,无刷伺服电机(因此无需维护)加上功能强大的连接滚针,确保了极高的效率。它的抓取力可以根据大小以两到四个增量进行调节。在高速版本中,闭合时间仅为0.03 s。但如需其他功能,比如逐个周期设置不同的行程或抓取力,或者监控过程数据,通过数字I/O并不能实现。
IO-Link传输参数化和诊断数据
具有IO-Link接口的雄克机械手能够通过数字点到点的连接传输参数化和诊断数据。这有效降低了布线工作,减少了系统中所需接口与连接器。SCHUNK PGN-plus-E和SCHUNK EGP IO-Link这两款机械手在市场上反响良好,均符合IO-Link B级标准以及对于软件和硬件的规格要求,可以轻松直观地集成到生产环境中,需要的前期工作量非常少。机械手的操作只需单根电缆控制和供电,并可从高级别控制器接收或上传数据。机械手通过IODD(IO设备描述)向更高级别的控制器报告。尽管目前只传输二进制开关状态(开/关)或模拟信号,但通过IO-Link可集中定义或修改位置和抓取速度等参数,通过软件设置来调节抓取力,以便搬运对力较为敏感的零件。在极端情况下,参数可以在不同的周期中进行调整。如果出现故障和错误,用户可以获知具体出错点并进行干预,为调试或更换机械手节省了大量时间。但因为IO-Link的通信总是需要一个IO-Link主机,这必然会增加投资,需要编程并限制数据吞吐量。也就是说IO-Link系统不具备真正的实时通信能力。当需要额外的功能,如相机、传感器或额外的数据时,通过IO-Link的通信也无法满足。

图3 由于PROFINET接口,SCHUNK EGL可用于要求更高的抓取过程,集成的调试助手功能可辅助编程
工业以太网支持实时控制
使用工业以太网接口(PROFINET、EtherCAT、Ethernet/IP)的雄克机械手相比通过数字I/O或IO-Link控制的机械手功能更为强大。只有采取该方式,才能将参照类型设置为速度、当前行程或工件等,同时可以实现其他功能,例如测量、定位、连接到用于调试的网络服务器,或者通过企业ERP系统或云解决方案连接到数据评估的网关。一个成功的例子是带有PROFINET接口的SCHUNK EGL通用机械手,经过PROFINET C类认证,将动力、多功能和智能化特性融为一体。抓取力可变范围从50~600N,在力适应抓取的模式下,它可以交替搬运重量在3 kg以下的工件,从电子生产中的电路板到消费品,再到机械工程中的组件装配。在过程中,手指位置、闭合速度和抓取力可在单指42.5 mm的最大行程范围内自由编程。为了缩短周期时间,能够以最高150 mm/s的速度将机械手指预定位至任何需要的地方。下一步,雄克将在高性能EtherCAT和Ethernet/IP接口方面对产品进行改进升级。
功能的选择取决于所使用的技术
每种类型的控制以及任何类型的通信接口都有其特定的优点和缺点。雄克的抓取系统专家建议单独查看每个应用程序及其各自的要求。如果只需要拿起工件,并且对过程没有进一步的要求,那么就可以放心地使用带数字I/O的气动或电动机械手。需要考虑中间位置时,可以使用IO-Link机械手,或者带有机械限位的气动机械手、弹簧或外部导向机械手。而如果需要实现实时控制,或者需要特殊参考或收集过程数据,则具有工业以太网接口的机械手特别适合。为了实现最佳性价比,所需的功能取决于所使用的技术。这正是雄克提供方案咨询时采用的规划策略。
热点文章
-

深耕中国 创新赋能 ——巴鲁夫成都技术创新中心盛大启幕
2026-06-23
-

用于水下作业的新型 AI 焊接机器人
2026-06-25
-

在碳化硅进入“下半场”,Wolfspeed想讲一个新的故事
2026-06-23
-

展品抢先剧透 | 堡盟携视觉黑科技亮相2026北京机器视觉展
2026-06-23
-

皮尔磁亮相第九届广州国际应急安全博览会
2026-06-25
-

皮尔磁:2027年欧盟机械安全新规,合规从现在开始
2026-06-25
-

品质至上:倍福卫生型产品全系列
2026-06-24
-

解锁AI落地深水区:红帽开源生态赋能企业数字化跃迁 ——2025红帽论坛重磅发布车用OS
10月31日,以 “解锁・下一步” 为主题的2025红帽论坛暨媒体沟通会在北京JW万豪酒店盛大召开。红帽通过核心主旨演讲、重磅新品发布、权威报告解读及高层对话,全方位展现了其以开源技术破解行业痛点、引领企业数字化转型的实力与愿景,为 AI 时代的企业创新注入强劲动力。
作者:
-
敏捷创新 “中国加速2.0”
-
赋心智 启新程 | 访埃夫特董事长兼总经理游玮博士
-
【MM时光机】2024年度精彩瞬间大盘点 杂志篇
-
施耐德电气亮相CeMAT ASIA 为智能物流多维赋能
-
探索智能未来的下一步 ——第12届中国硬科技产业链创新趋势峰会暨百家媒体论坛成功举办







评论
加载更多