强大的焊接应用数据处理 — 威格勒 uniVision 3 视觉软件 (3)
智能焊接引导与定位系统(3)—— uniVision 3 视觉软件
使用威格勒 uniVision 3 视觉软件强大且友好的焊接应用数据处理
威格勒视觉软件 uniVision 3 为处理二维高度轮廓数据提供了功能强大且用户友好的方式。使用“轮廓焊缝引导装置”模块,可以简单快速地识别焊缝,以进行焊缝跟踪和焊缝定位。
借助威格勒的“轮廓焊缝引导装置”模块,可以根据 2D/3D 轮廓传感器的高度轮廓可靠识别所有焊缝类型。该模块提供引导点以及精确控制机器人所需的其他焊缝特定测量值。因此,它构成使用机器人或线性化工作台进行传感器控制型焊缝跟踪应用的基础。
01

基于 Web 的可视化
每个焊缝检测模板作业都包含基于 Web 的可视化功能,可一目了然地显示所有相关结果。还可以对自己的个性化可视化进行参数设置。网络浏览器定期更新可视化的内容,以便操作人员获得过程的视觉反馈。通过拖放可以插入以下可视化功能:
● 与实时配置文件
● 与引导点坐标
● 与状态指示灯
● 与测量值(例如宽度、高度、偏移、面积)
● 与图片 / 徽标
● 与叠加(例如线条、术语、值、标记等)
02、在光亮表面上实现高精度焊缝引导
在焊接过程中,所用材料的类型起着至关重要的作用,因为不同的金属具有不同的光学特性。有些金属具有哑光表面,可清晰检测,而其他金属(如铝)则非常光亮。这会产生大量反射,从而影响焊缝的可见性。待焊接部件的形状也会影响反射。尤其是圆形对象比扁平结构产生更多反射。
威格勒的 MLZL 传感器与 uniVision 软件相结合,即使在高度反射的金属表面上也能精确识别焊缝位置。通过专门的软件算法最大程度地有效减少光反射,从而可以可靠地处理和分析轮廓数据,以确保精确的焊缝引导。
03、使用威格勒 P3 三角测量法激光测距传感器进行焊缝定位
除了 2D/3D 轮廓传感器外,还可使用威格勒 P3 系列三角测量法激光测距传感器进行焊缝定位。这些传感器根据三角测量原理工作,可以连续测量与表面的距离,从而识别出细小的距离差异。即使是光亮的金属表面,该技术也能精确检测非常薄的焊缝。
● 模拟输出端:4…20 mA
● 可用蓝牙进行无线调节
● 便于操作的图形显示器
● 不受材料、颜色和亮度影响的测量值
● 铝质外壳坚固
04、焊接引导与定位的典型应用

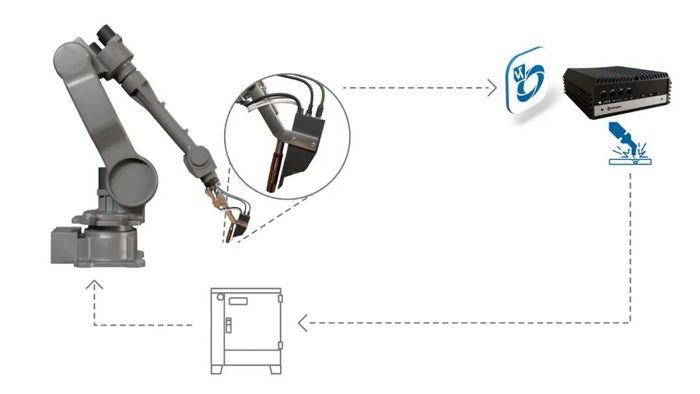
在机器人单元中的焊缝导向装置
在全自动机器人焊接单元中,在焊接前必须确定准确的对接位置。在机器人的焊炬前方直接安装一个威格勒 2D/3D 轮廓传感器。传感器通过激光三角测量法识别对接方式。通过 uniVision 软件测定导向点并将其发送给控制器定位焊缝。

焊接储罐时对焊缝进行自动引导
在对钢罐进行自动焊接时,焊缝的精确定位至关重要。安装在焊枪上的威格勒 2D/3D 轮廓传感器确定轮廓走向,通过分析单元将位置数据发送到线性轴上,以便引导焊枪。特殊的防护外壳保护传感器免受焊接飞溅物和外来光线的影响。

埋弧焊设备中的焊缝导向
在钢铁行业中,材料厚度超过六毫米时会使用埋弧焊工艺。为了准确引导安装在直线轴上的焊炬,必须准确测量焊缝。安装在焊头前面的威格勒 2D/3D 轮廓传感器配有冷却模块和防护片,即使在高温下也能以微米级精度测量焊缝处的轮廓线。
文章来源:威格勒wenglor
图片来源:威格勒wenglor
转载平台:微信公众号
责任编辑:朱晓裔
审 核 人:李峥
热点文章
-

新质生产力驱动下民爆行业转型升级探究
2026-05-26
-

ABB与易来签署战略合作,加速布局智能家居市场
2026-05-26
-

以永续之力,铸工业绿色增长 台达亮相第九届绿色工厂厂务大会并主办ESG专题论坛
2026-05-26
-

皮尔磁:安全连接功能块实现“跨系统”协同
2026-05-28
-

应用案例|劳易测助力德马泰克“飞龙系统”实现智能物流升级
2026-05-26
-

倍福丨TwinCAT 50μs 极速控制!比闪电快 4000 倍!
2026-05-28
-

从合规改造到人才培育,皮尔磁助力乳企安全长效运营
2026-05-28
-

解锁AI落地深水区:红帽开源生态赋能企业数字化跃迁 ——2025红帽论坛重磅发布车用OS
10月31日,以 “解锁・下一步” 为主题的2025红帽论坛暨媒体沟通会在北京JW万豪酒店盛大召开。红帽通过核心主旨演讲、重磅新品发布、权威报告解读及高层对话,全方位展现了其以开源技术破解行业痛点、引领企业数字化转型的实力与愿景,为 AI 时代的企业创新注入强劲动力。
作者:
-
敏捷创新 “中国加速2.0”
-
赋心智 启新程 | 访埃夫特董事长兼总经理游玮博士
-
【MM时光机】2024年度精彩瞬间大盘点 杂志篇
-
施耐德电气亮相CeMAT ASIA 为智能物流多维赋能
-
探索智能未来的下一步 ——第12届中国硬科技产业链创新趋势峰会暨百家媒体论坛成功举办







评论
加载更多